
Native token ROBO sees continued capital outflow, causing community sentiment to collapse for a time. Today we’ll take a detailed look at ROBO’s underlying logic: the OM1 system
🔽🔽🔽🔽🔽🔽🔽🔽
First, set a positioning:
OM1 is an “AI-native, hardware-neutral, open-source modular robot operating system (the Android of the robotics world)” launched by OpenMind. It focuses on a unified intelligent robot base across brands + a decentralized collaboration network, Fabric
1. Project background and positioning
1) Industry pain points
Traditional robots:
• Each manufacturer uses its own closed-source system (Tesla, Boston Dynamics, and various in-house stacks)
• The software ecosystems for quadrupeds/humanoids/wheeled robots are fragmented
• Every time you change hardware, you must rewrite the perception, navigation, and interaction code from scratch—development costs are extremely high
2) OM1’s core objectives
Build a general embodied intelligence runtime (Robot OS):
Hardware abstraction layer + multimodal AI core + local + cloud inference + cross-robot collaboration network
Slogan: AI-Native (designed for large models and embodied intelligence from the ground up—not retrofitting an LLM onto an old ROS)
Open-source license: MIT open source (public on GitHub)
3) Team and capital
Headquarters in San Francisco; a Stanford University professor leads the team. The founding team comes from Google and Tesla’s robot teams. Early funding was about $20 million, with deep ties to the robot hardware ecosystem (Unitree Technology, UBTECH, NVIDIA, etc.).

The four core layers of the architecture (Perception → Memory → Decision → Action)
Layer 1: Hardware Abstraction Layer (HAL) (the lowest layer)
• Hardware-agnostic: level out differences in motors, LiDAR, cameras, and chassis across different robots
• Native compatibility: ROS2, DDS, Zenoh; Docker containerized deployment
• Supported chips: ARM64 (Jetson/Orin), AMD64
• Native hardware adaptation: Unitree Go2/Go1, G1 humanoid, wheeled robots, robotic arms, LIMX humanoid, etc.
One sentence: no matter what shape the robot is, use the same set of top-level AI instructions to control it
Layer 2: Multimodal perception fusion layer
• Sensor fusion: LiDAR SLAM, depth cameras, visual large model VLM, microphone arrays
• Environment mapping, person recognition, scene understanding, and spatial memory
• Privacy design: face de-sensitization, regional data filtering, compliant data collection
Layer 3: the cognition layer (OM1’s most core highlight)
1. Persistent long-term memory: Memory Bank
The robot remembers past conversations, user preferences, spatial waypoints, and historical tasks, preserving memory across open-ended opportunities to chat
2. Native LLM/VLM orchestration core
Built-in adapters for plug-and-play access: GPT-4o, Gemini, DeepSeek, and local open-source large models
Use natural language as the internal command bus for the robot
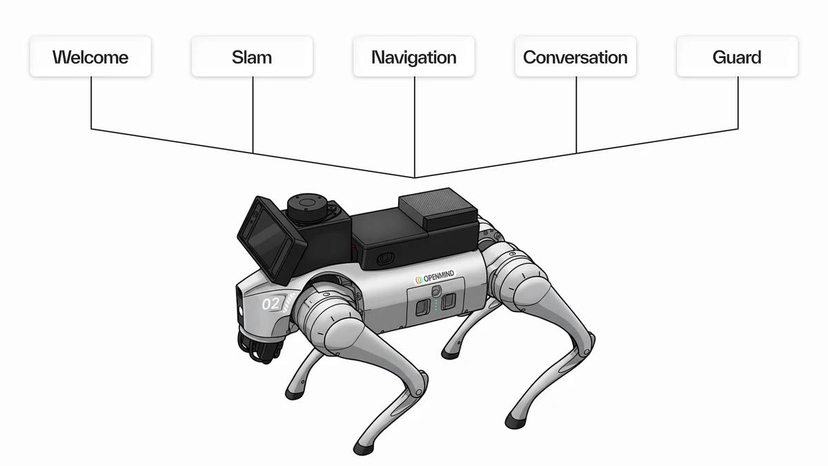
3. Task-planning agent
Break down a single natural-language instruction (“Patrol the exhibition hall; when you encounter visitors, proactively greet them”) into step-by-step tasks: navigation, visual detection, speech interaction, and action execution
Layer 4: Execution layer (motion and interaction outputs)
• Navigation stack: autonomous obstacle avoidance based on Nav2 + SLAM, and waypoint cruising
• Send motion commands to the chassis/joint controllers
• Text-to-speech and screen avatar output
• Supports both local edge inference and cloud hybrid inference dual modes

III. Two ace technologies: OM1 + the FABRIC network (with supporting ecosystem)
1) OM1 (single-robot brain)
Modular, containerized microservices that can be independently upgraded for perception, large-model, or navigation modules without interfering with each other
• Simulation environment WebSim / Gazebo: train in computer simulation first, then deploy on real hardware
• SDK: Python first—low barrier for developers to build robot skills
• Skill store model: install new robot capabilities like you would install apps on a phone (inspection, guiding, companionship, and warehousing inspection)
2) FABRIC decentralized collaboration network (OM1’s upper network layer)
This is the key difference between OpenMind and a typical robot OS:
1. Assign a decentralized digital identity to each OM1 robot
2. Secure networking across vendor robots, shared maps, shared environment experience, and coordinated work
3. Distributed experience learning: a path/policy optimized by one robot in a scene can be synchronized—under authorization—to other robots in the cluster
4. Includes on-chain task settlement and trusted device verification (rumors of cooperation with the early Pi Network ecosystem)
Simple understanding:
OM1 is a single robot’s brain; Fabric is the “collective cloud brain” of a group of robots
IV. Summary of key technical features
1) AI-native design (different from traditional ROS)
Traditional ROS: prioritize motion control; AI is an add-on
OM1: large-model agents, multimodal perception, memory, and reasoning are the system’s native foundational components
2) Modular, plug-and-play architecture
• Swap in whichever visual model, LLM, or navigation algorithm you want—plug-in replacement
• Three deployment modes: industrial deployment, research prototypes, and education/training
3) Local edge + cloud hybrid deployment
• Safety-critical actions (obstacle avoidance, balance): run locally with low latency
• Complex reasoning, long-text dialogue, and big-data training: call the cloud OM1 API (pay-as-you-go API service)
4) Designed for commercial deployment
• Monitoring, rate limiting, logging, and device maintenance backend
• Industry preset templates: park inspection, hospital companionship, exhibition hall guiding, and factory security
V. Main application scenarios
1. Commercial service humanoid/quadruped robots
Exhibition hall guiding, building inspection, property security, and hospital companion assistance
2. Research and university robot platforms
A unified development foundation, so you don’t need to reinvent wheels for different hardware
3. Industrial flexible-robot clusters
Multi-robot coordination for sorting, inspection, and warehousing across robots of different forms
4. B2B SaaS robot API service
Enterprises can call OM1 cloud services to quickly build customized service robots, significantly lowering self-development costs

VI. Advantages & shortfalls in the current stage (objective)
✅ Advantages
1. A unified ecosystem across hardware, reducing fragmentation in robot development
2. Dual tracks: open source + commercial cloud services, balancing research and commercial use
3. Deeply integrate LLMs, embodied perception, and spatial navigation into one unified stack
4. Containerized deployment, following modern cloud-native development paradigms
⚠️ Current limitations (Beta stage)
1. Heavy-duty whole-body motion control for humanoids—no match for Boston Dynamics’ internally developed motion stack with deep optimization
2. Heavily depends on large-model APIs; offline pure local deployment capability is still under iteration
3. The Fabric decentralized network is still in the testing phase; there are relatively few large-scale commercial use cases
VII. One-sentence summary
OM1 = an open-source, general-purpose operating system for robots in the era of embodied intelligence.
By smoothing hardware differences via the hardware abstraction layer, OM1 uses large models plus long-term memory as the robot’s “cognitive brain.” Combined with the Fabric decentralized network, it enables multi-robot cross-brand collaboration. The goal is to become a unified software foundation layer for the robotics industry.

