
Zauważyłem coś dziwnego, gdy późną nocą czytałem raport o incydentach związanych z robotyką. Robot magazynowy zatrzymał się w połowie zadania, ponieważ dwa oddzielne harmonogramy AI wydały sprzeczne instrukcje. Żadne polecenie nie było złamane ani nielegalne, lecz robot po prostu nie miał sposobu, aby zweryfikować, które polecenie zapewnia mu legitymację ekonomiczną.
To pokazuje główną koncepcję, która naprawdę mnie uderzyła, gdy myślę o systemach robotycznych działających autonomicznie, największym problemem nie jest inteligencja ani technologia robotów działających autonomicznie, ale raczej to, jak systemy maszynowe będą koordynować i działać w niepewnym środowisku. Maszyny mogą wykonywać zadania perfekcyjnie, ale wciąż mają trudności z określeniem, czyje instrukcje powinny ekonomicznie ufać.
Problem staje się jaśniejszy, gdy spojrzysz na to, jak większość platform robotycznych działa dzisiaj. Decyzje, logi i historie zadań są zablokowane w zamkniętych systemach, co oznacza, że weryfikacja rzadko istnieje poza operatorem, który kontroluje robota. Gdy maszyny zaczynają wchodzić w interakcje w sieciach, żądając usług, handlując zasobami lub delegując pracę, te zamknięte środowiska stają się delikatnymi punktami koordynacji.
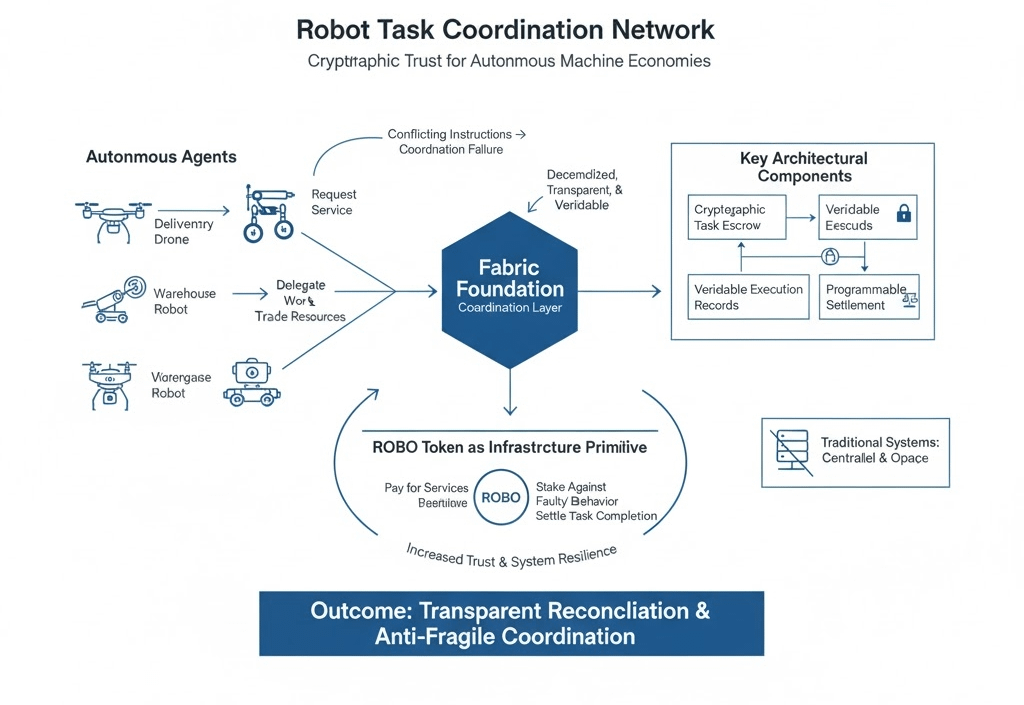
Często wyobrażam sobie przyszły ekosystem logistyczny, w którym maszyny negocjują zadania tak, jak rynki negocjują ceny. Dron dostawczy może żądać usług załadunkowych od robota magazynowego, podczas gdy AI mapujący sprzedaje aktualizacje nawigacyjne autonomicznym pojazdom poruszającym się po tym samym regionie. W tym świecie roboty nie są już tylko narzędziami, stają się aktorami gospodarczymi.
Problem infrastruktury pojawia się szybko. Tradycyjne systemy polegają na scentralizowanych harmonogramach lub prywatnych bazach danych do rozwiązywania sporów, ale gospodarki maszynowe generują interakcje zbyt szybko i w zbyt wielu uczestników, aby ten model mógł się skalować. Bez przejrzystych warstw uzgadniania, autonomiczne agenty mogą prowadzić transakcje, ale nie mogą niezależnie zweryfikować legalności wyników.
Dlatego niektóre elementy architektury wokół @Fabric Foundation były interesujące do obserwacji. Zamiast traktować robotykę wyłącznie jako wyzwanie programistyczne, system definiuje koordynację jako brakującą warstwę, wykorzystując kryptograficzne depozyty zadań, weryfikowalne rejestry wykonania i programowalne rozliczenia, aby umożliwić maszynom potwierdzenie, że praca rzeczywiście miała miejsce.
W tym środowisku, #ROBO zaczynają wyglądać mniej jak spekulacyjne aktywa, a bardziej jak prymitywy infrastrukturalne. Jeśli roboty muszą płacić za usługi, stawiać w obliczu błędnego zachowania lub autonomicznie rozliczać zakończenie zadań, potrzebują neutralnego medium wymiany, z którym agenci programowi mogą wchodzić w interakcje bez polegania na scentralizowanych pośrednikach.
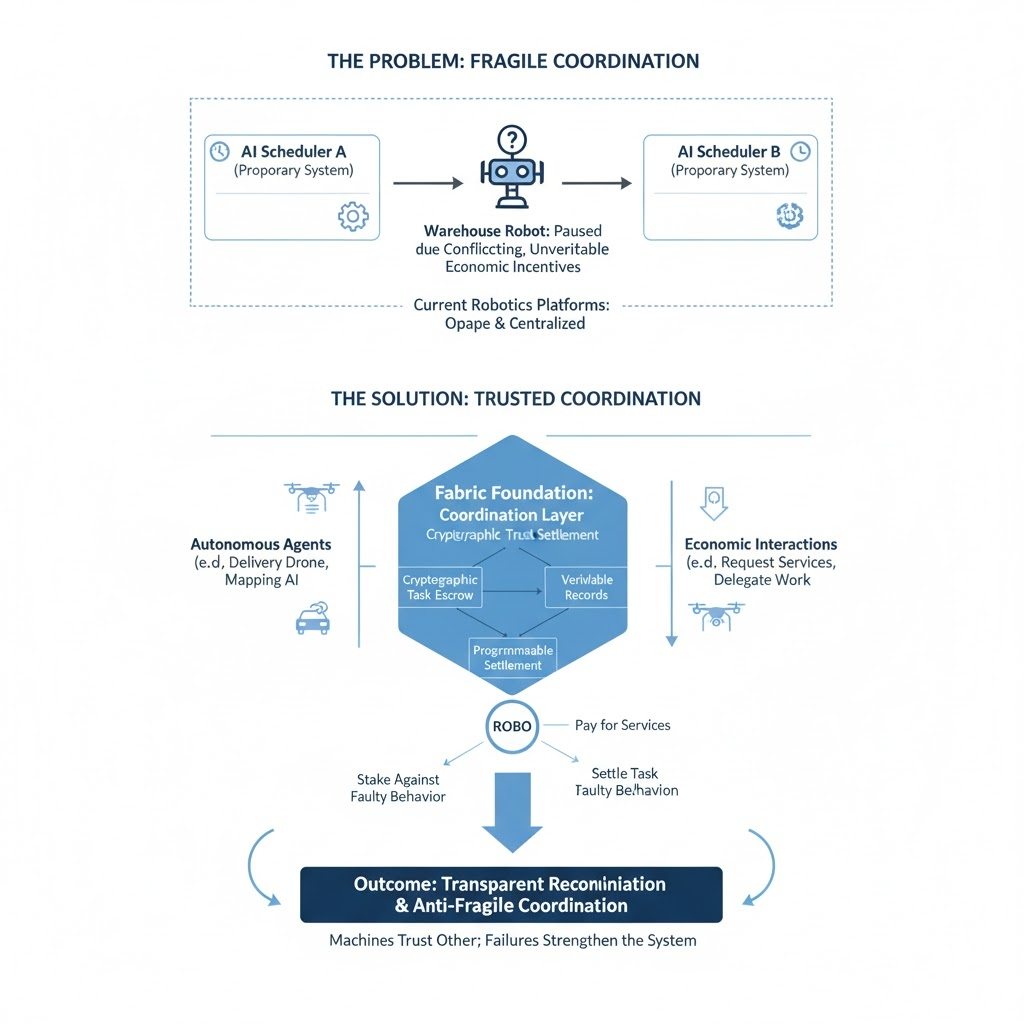
Co mnie najbardziej intryguje, to idea, że takie systemy mogą stać się antykruchymi. Rynki nieuchronnie wprowadzają zmienność, awarie i nieoczekiwane zachowania, ale protokoły zaprojektowane w celu weryfikacji pozwalają na transparentne ujawnienie awarii, zamiast pozostawać ukrytymi w nieprzejrzystych platformach. Każda awaria staje się informacją, która wzmacnia warstwę koordynacji.
Oczywiście, ironią jest to, że wiele dzisiejszych „autonomicznych” maszyn nadal ma trudności z bardzo prostymi rzeczami. Za każdym razem, gdy widzę robota wahającego się przed przeszkodą, którą człowiek by z łatwością obejdzie, przypominam sobie, że inteligencja może przychodzić powoli, ale infrastruktura, która pozwala maszynom ufać sobie nawzajem, może przyjść jako pierwsza.
$ROBO #BTC #ETH #Write2Earn #crypto
