@Fabric Foundation #ROBO $ROBO
La coda ha detto la verità prima che lo facesse il pannello.
Non il grande pannello. Quello sembrava ancora educato.
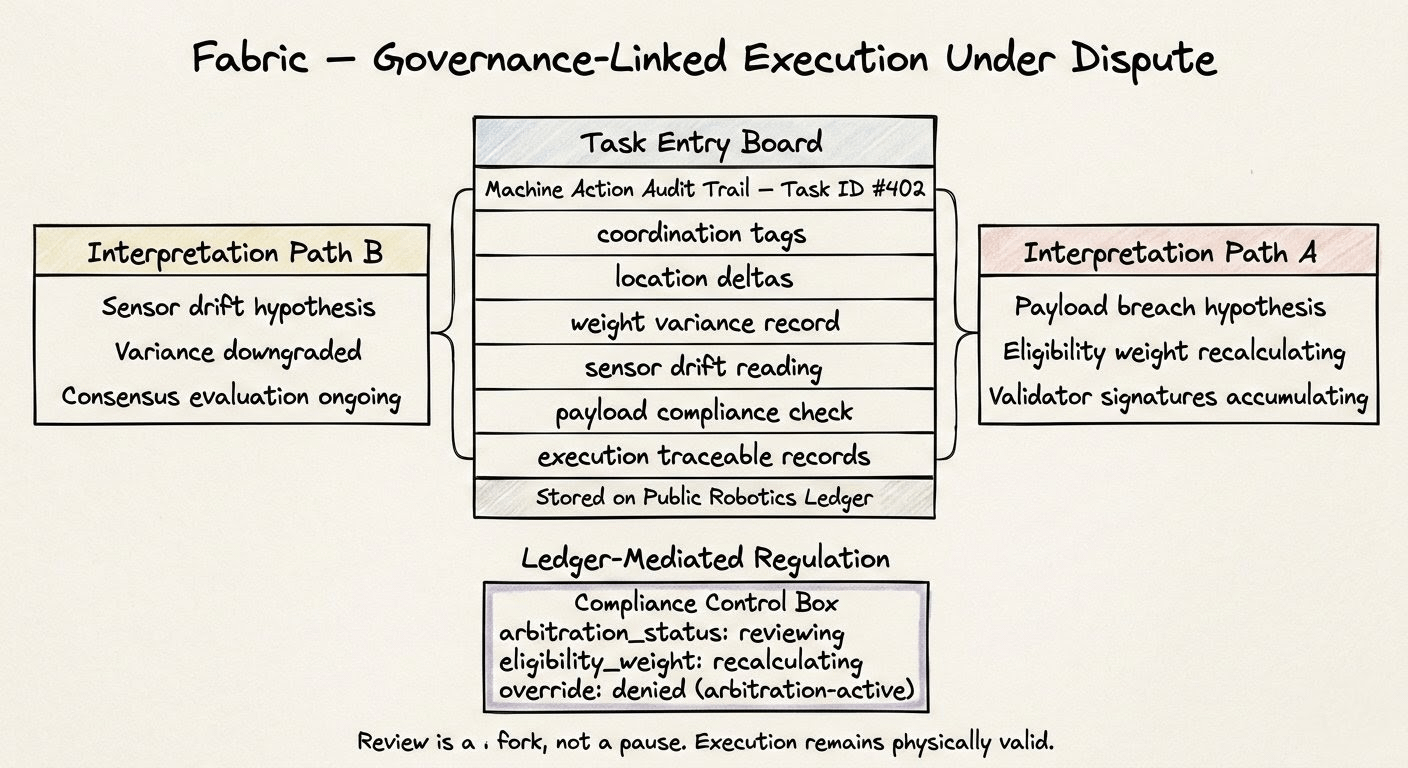
Voglio dire la coda di governance in basso a destra che attira la tua attenzione solo sul tessuto, quando inizia a comportarsi come una seconda linea temporale.
task_8841: irrisolto
task_8842: in esecuzione
task_8843: richiesto
Stessa macchina.
Stessa corsia.
Il primo compito è ancora in attesa di ripetizione delle regole, mentre il secondo si stava già muovendo e il terzo ha avuto il coraggio di chiedere spazio.
Quello sembrava peggio di “ritardo.”
Sembrava amministrativo.
La console teneva la storia facile in cima.
task_state: completo
Verde di nuovo. Linea pulita. Nessuna esitazione in essa. Il robot aveva già completato il primo ciclo di movimento, posizionato il componente, corretto il polso, andato in attesa e si era inclinato verso la prossima istruzione mentre il coordinamento del libro mastro pubblico di Fabric stava ancora cercando di decidere cosa contava l'azione precedente.
Ho spento il feed della telecamera e sono rimasto con il libro mastro.
Questo sembrava più onesto.
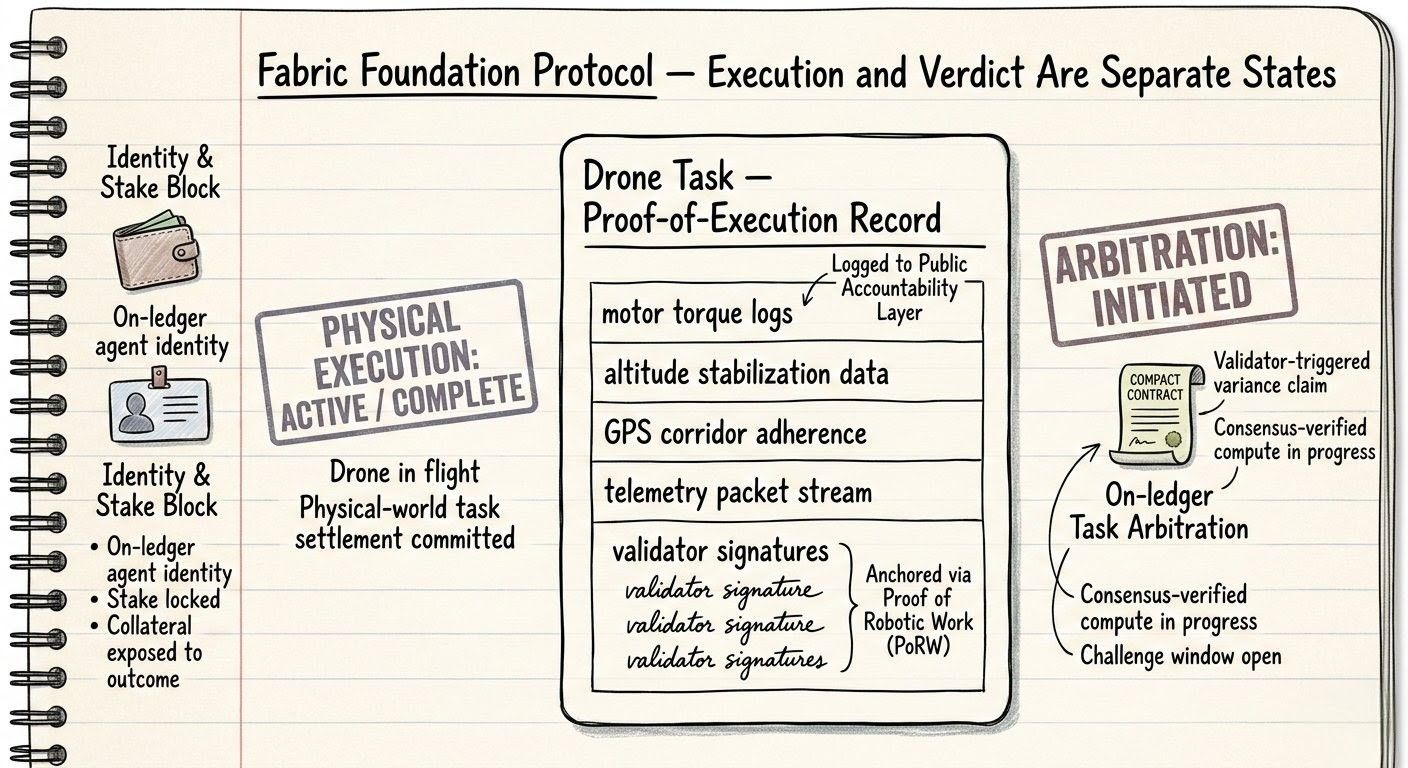
All'interno dell'infrastruttura nativa dell'agente di Fabric (@Fabric Foundation ), il movimento non arriva come un singolo fatto. Lascia una traccia che deve sopravvivere alla riproduzione. La macchina può completare un compito in un'unica movimento continuo. La governance lo riceve come frammenti: traccia comportamentale, superficie della policy, interpretazione della sicurezza, formazione del quorum. Il calcolo verificabile non è interessato a quanto ovvio apparisse il movimento. Vuole abbastanza struttura per difenderlo successivamente.
Ho colpito il filtro sbagliato per primo.
Indietro.
Poi il giusto.
Il primo compito portava un peso di governance maggiore di quanto il pannello ammettesse.
execution_record: impegnato
behavior_trace: aggiunto
policy_trace: in riproduzione
decision_state: in sospeso
Quattro linee.
Ancora non sufficiente per risolverlo.
Su fabric un nodo stava già masticando attraverso la riproduzione. Un altro non era stato ancora assegnato. Il terzo era iniziato e poi era scivolato lateralmente in un altro ramo.
policy_nodes: 2
policy_quorum: 4
policy_node: riassegnato
Quella piccola riassegnazione mi ha irritato più di quanto avrebbe dovuto. Non perché fosse insolita. Perché il robot chiaramente non gliene importava. Si era già spostato nel secondo compito come se il primo appartenesse alla storia.
Ho scorrimento indietro attraverso il record di movimento cercando qualcosa di abbastanza drammatico da giustificare il ritardo.
Niente.
Traettoria pulita. Scansione del sensore normale. Nessuna prossimità di collisione. Nessuna lettura instabile. Solo un'azione perfettamente ordinaria che trascina un peso di policy più pesante di quanto mi aspettassi.
Questo è l'insulto.
Il robot fa sembrare triviale una cosa.
La governance ti ricorda che non lo è.
Ho duplicato il primo compito in una corsia di simulazione ristretta e ho rimosso un gancio di regola discrezionale dalla superficie di riproduzione all'interno di fabric. Non il movimento. Non il percorso dell'attuatore. Solo un pezzo di esitazione codificata dalla governance.
La riproduzione è tornata più veloce.
rule_surface: completo
decision_latency: 46ms
rule_surface: ristretto
decision_latency: 29ms
Eccolo lì.
Stessa movimentazione fisica.
Diverso carico politico.
Questo ha cambiato la sensazione dell'intero schermo. Il primo compito non stava aspettando perché il robot avesse fatto qualcosa di strano. Stava aspettando perché l'ancoraggio della prova di lavoro robotico doveva portare un peso sociale maggiore di quanto la macchina stessa avesse bisogno per completare l'azione.
Ho eseguito la versione ristretta accanto all'originale e ho osservato la coda ordinarli senza drama.
Nessun segnale di allerta.
Nessun rifiuto.
Solo un percorso di prova più pesante dell'altro.
Nel frattempo, il secondo compito continuava ad avanzare.
joint_load_delta: +0.14
wrist_correction: attivo
actuator_cycle: stabile
La macchina stava costruendo lo stato futuro mentre il fabric stava ancora formalizzando il passato.
Questo è il vero divario.
Non velocità contro lentezza.
Produzione contro ammissione.
Ho controllato di nuovo la coda dal vivo.
task_8841: irrisolto
task_8842: completo
task_8843: in esecuzione
Questo mi ha fatto ridere una volta.
Non perché fosse divertente.
Perché la macchina aveva già spostato il problema di un livello davanti alla governance.
Ho fissato la linea irrisolta più antica abbastanza a lungo da perdere il primo lampo nel pannello dei nodi. Quando ho alzato lo sguardo, un altro nodo di policy si era unito e il carico si era spostato di nuovo.
policy_nodes: 4
governance_state: accettazione_provvisoria
Sufficiente per iniziare.
Abbastanza in ritardo da contare.
Il primo compito era finalmente diventato governabile solo dopo che il secondo era già finito e il terzo aveva iniziato a chiedere spazio. Il pannello sembrava ancora calmo. La coda sembrava composta. Ma sotto di esso, la collaborazione sicura uomo-macchina non era una promessa o uno slogan su fabric. Era un trascinamento con una ragione.
Ho lasciato aperte tutte e tre le linee di compito.
Uno finito.
Uno accettato.
Uno che sta ancora diventando spiegabile.