That sounds small, but I think it changes everything.
Most of the time, when people talk about robotics, they start with the machine itself. The body. The movement. The dexterity. The sensors. Whether it can pick something up, move through a room, or complete some task without failing halfway through. That is the obvious place to look. It is the visible part. It gives people something concrete to react to.
But the visible part is only the surface.
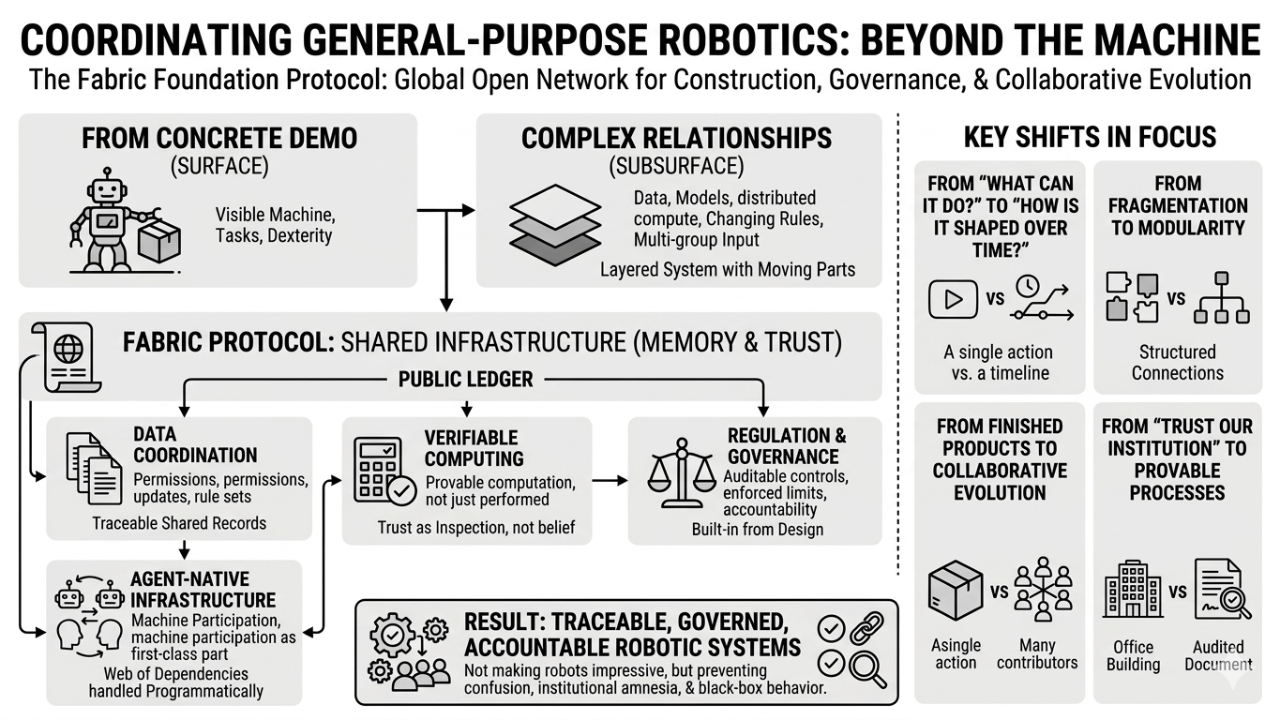
Once robots start becoming more general, more connected, and more involved in real environments, the harder problems shift somewhere else. Not into the metal, exactly. Into the relationships around it. Into the systems that decide what the robot knows, how it computes, what rules it follows, who can change its behavior, who is responsible for what, and how all of that is recorded.
That is where @Fabric Foundation Protocol seems to place its attention.
It describes itself as a global open network, supported by the non-profit Fabric Foundation, that enables the construction, governance, and collaborative evolution of general-purpose robots through verifiable computing and agent-native infrastructure. That is a formal way to put it. But if you sit with it for a minute, the idea underneath feels more grounded than the wording.
It is really about coordination.
Not coordination in the soft, vague sense. More in the practical sense of keeping a growing system from becoming impossible to follow. Because once you have robots that rely on shared data, shared models, distributed compute, changing rules, and input from many groups, things stop being simple very quickly. The machine may still look singular from the outside, but inside it is already a layered system with many moving parts.
You can usually tell when a technology is reaching that stage. The focus slowly moves away from what it can do in a demo and toward what holds it together once many people start building on top of it.
That seems to be the point where Fabric enters.
The protocol coordinates data, computation, and regulation through a public ledger. That line is probably the center of the whole thing. Not because ledgers are magical, but because shared systems need memory. They need a place where actions, decisions, permissions, updates, and rules can leave some kind of trace. Without that, everything depends on private records, local assumptions, and trust that tends to weaken once the system gets large enough.
And robots do not stay small for long, at least not conceptually.
The moment a robot becomes part of a broader network, the question changes from “what can this machine do?” to “how is this machine being shaped, checked, and governed over time?” That is a different kind of question. A slower one. Less cinematic. Probably more important.
That is where things get interesting.
Fabric seems to assume that general-purpose robotics will not work well if every important layer remains fragmented. One group holds the data. Another controls compute. Another writes the rules. Another deploys the machine. Another deals with the consequences. That kind of fragmentation can function for a while, especially in early stages, but it becomes harder to manage as systems become more adaptive and more public-facing.
So Fabric’s answer, at least from this description, is to create common infrastructure where these layers can meet without fully collapsing into one another. That modular part matters too. It is not trying to force everything into one block. It is trying to create a shared framework where different parts can still connect in a structured way.
That feels sensible.
Because robotics is already messy enough. Hardware changes slowly. Software changes fast. Regulation moves unevenly. Data quality varies. Real-world conditions refuse to stay neat. People working on the same system often have very different responsibilities and very different ideas of what matters most. In that kind of environment, coordination becomes a technical issue, not just an organizational one.
And maybe that is one of the more useful ways to read Fabric.
Not as a shiny new layer added on top of robots, but as an attempt to formalize the background conditions that robotics will eventually depend on anyway.
The mention of verifiable computing fits into that pretty naturally. In a lot of systems, computation happens out of sight, and people are expected to trust the output because the institution behind it says they should. Sometimes that works. Sometimes it does not. But with robots, especially general-purpose ones, the cost of hidden processes can feel higher. These are systems that can act physically in the world. They can affect people, spaces, workflows, and safety conditions.
So a protocol that treats computation as something that should be provable, not just performed, is making a quiet argument about trust.
Not trust as belief. Trust as inspection.
That is an important difference. If a robot behaves in a certain way, there should be some way to understand what informed that behavior. What data was involved. What computation was run. What rule set applied. Whether the process matched what it claimed to be. Maybe not every ordinary person will check those details directly, but the fact that the details can be checked changes the system itself. It pushes against the black-box tendency that complex technology often drifts toward.
It becomes obvious after a while that this is not only about robots doing tasks. It is about robots becoming part of institutions, shared environments, and public consequences.
That is why governance sits so close to construction in Fabric’s description.
Usually, governance gets mentioned late. Almost as a balancing statement. Something added once the exciting part is over. Here it seems built into the center of the design. The protocol is not just for building robots. It is also for governing how they evolve, how they interact, and how responsibility stays attached as the system changes.
That feels more realistic than pretending governance can be added later without changing the foundations.
Because once a machine is already acting in the world, the structure around it matters just as much as the code inside it. Who can update it? Under what conditions? What limits are enforced? What standards are applied? What records are kept? What happens if something fails? These are governance questions, yes, but they are also infrastructure questions. The two start blending together.
Fabric seems to accept that instead of trying to keep them separate.
The phrase agent-native infrastructure points in the same direction. It suggests that the protocol is designed for a world where agents are not just passive tools. They participate. They coordinate. They exchange information and possibly trigger actions inside a shared framework. That means the infrastructure has to support more than simple command-and-response behavior. It has to support machine participation as a first-class part of the environment.
That sounds abstract until you think about what robotics is becoming.
A robot is no longer just a mechanical device executing fixed routines. It may rely on models, external services, real-time data, other software agents, human approvals, and networked policies all at once. In that setting, the robot is really sitting inside a web of dependencies. So the protocol underneath has to handle that complexity without losing track of what is happening.
That is probably why Fabric talks about collaborative evolution instead of treating robots like finished products.
Robots are not done once they are built. They keep changing. Their capabilities shift. Their boundaries move. Their safety assumptions get revised. Their training data expands. Their uses drift away from what was first imagined. Different contributors keep adding pieces. In a closed system, that evolution can happen quietly. In an open one, it needs structure or it turns into confusion.
So the protocol seems to be asking: how do you let many parties improve robotic systems together while still keeping actions accountable and rules visible?
That is not a small question.
And it is probably more central than the usual surface questions people ask about robotics. The real challenge may not be getting a robot to perform one task in one controlled environment. The real challenge may be building conditions where many systems, many contributors, and many constraints can coexist without the whole thing becoming unreadable.
Fabric reads like an attempt to build those conditions.
The public ledger, then, is not just a record of activity. It is a way of preventing institutional amnesia. A way of making sure contributions, decisions, and constraints do not dissolve into private memory or scattered databases. In ordinary software, that kind of structure is useful. In robotics, it may be necessary. Physical action creates consequences that people want explained. Shared systems create changes that people want traced. Open collaboration creates disagreements that people want governed.
Without some common layer underneath, those tensions tend to pile up.
With one, they do not disappear, but they become more manageable.
And that may be the quiet value in Fabric’s design. It is not trying to remove complexity. It is trying to give complexity a place to live where it can still be observed. That is a different goal from simplification. Maybe a more honest one.
Because robots, especially general-purpose ones, are probably not going to fit into a tidy model for very long. They will involve too many actors, too many edge cases, too many revisions, too many overlapping expectations. The cleaner story is usually the less accurate one.
Fabric seems to start from that mess instead of hiding it.
So from this angle, the protocol is less about making robots impressive and more about making robotic systems traceable as they become public, shared, and difficult to contain inside any one institution. A network for remembering, verifying, coordinating, and governing. Not the robot itself, but the structure that keeps the robot from becoming detached from responsibility.
That is a quieter way of looking at it.
But maybe also a more durable one.
Because after the excitement around capability settles down a little, that is usually where attention returns anyway. To the systems underneath. To who controls them. To who can inspect them. To how they change. To whether many people can build together without losing sight of what is actually happening.
Fabric seems to live in that part of the conversation.
And that part tends to stay open.
#ROBO $ROBO
Artikel
What stands out about Fabric Protocol is that it does not really begin with the robot.
Haftungsausschluss: Die hier bereitgestellten Informationen enthalten Meinungen Dritter und/oder gesponserte Inhalte und stellen keine Finanzberatung dar. Siehe AGB.