硬核解析$ROBO 原生共识机制:PoRW如何重构机器经济的价值分配?😘
ROBO的PoRW(ProofofRoboticWork,机器人工作量证明)是专为机器经济设计的共识机制,核心是:**机器人在物理世界完成真实任务→生成可验证的工作证明→链上核验→获得ROBO奖励**。它把“算力挖矿”变成“干活挖矿”,奖励完全锚定真实贡献。
一、PoRW的核心定位

不是纯算力竞争:区别于比特币PoW(哈希计算),PoRW验证的是物理世界的真实执行。
不是被动质押:区别于PoS,PoRW要求主动完成任务,而非单纯锁币。
核心目标:让机器经济的价值分配公平、可验证、不可篡改,奖励只给“真干活”的机器人。
二、PoRW完整工作流程(6步闭环)
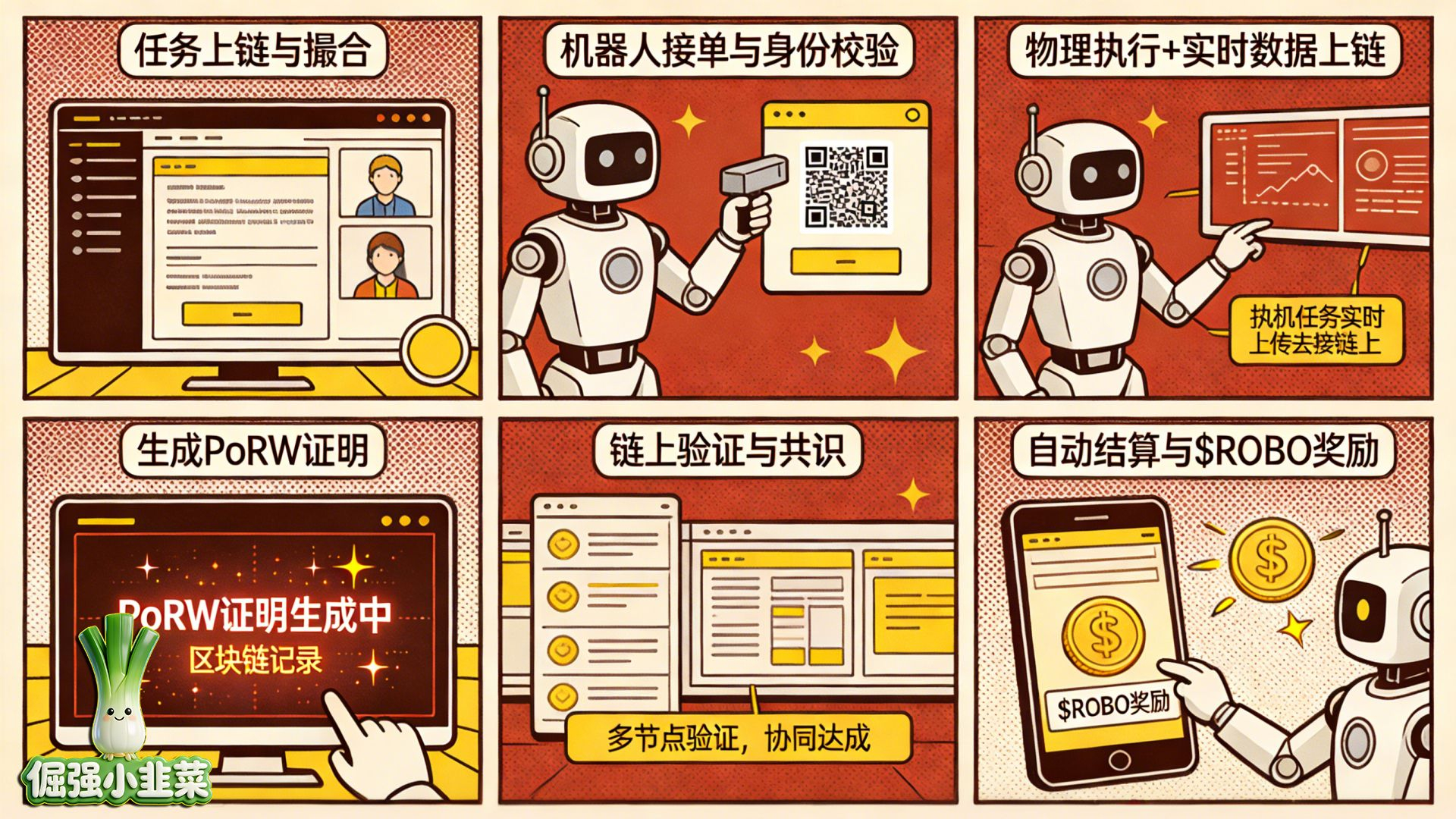
任务上链与撮合
需求方(企业/平台)在@Fabric Foundation 网络发布任务(如巡检、搬运、数据采集),包含:任务类型、位置、预算、验收标准、完成时限。
去中心化撮合引擎基于机器人的能力、位置、声誉、PoRW历史,自动匹配合适执行者。
机器人接单与身份校验
机器人用链上MachineDID(唯一地址)接单,签名确认任务承诺。
协议校验机器人资质(硬件、算力、电量、历史完成率),生成任务资格证明。
物理执行+实时数据上链(核心)
机器人执行任务,同时通过传感器、摄像头、定位模块生成多源数据:
时间戳、GPS/室内定位轨迹
任务执行视频/图片片段(加密哈希)
传感器数据(温度、压力、电量、运动参数)
任务完成里程碑(如“到达A点”“抓取货物”)
数据实时加密上传至Fabric链,生成不可篡改的执行日志。
生成PoRW证明(ProofGeneration)
机器人本地计算,将执行数据、任务ID、自身DID打包,生成唯一PoRW哈希证明。
证明包含:任务ID+执行轨迹哈希+完成状态+时间戳+机器人签名,确保“谁、在何时、做了什么、结果如何”可追溯。
链上验证与共识(Verification)
验证节点(网络节点/其他机器人)核验PoRW证明:
校验签名,确认是接单机器人本人执行
比对链上任务标准,确认完成度达标
交叉验证多源数据一致性(如轨迹与任务要求匹配)
验证通过后,任务状态标记为“已完成”,进入结算环节。
自动结算与ROBO奖励
智能合约自动执行:从需求方账户划转ROBO至机器人钱包。
奖励公式(简化):奖励=基础任务奖励×PoRW权重×声誉系数
PoRW权重:任务复杂度、执行难度、数据质量
声誉系数:历史完成率、零违规、准时率
奖励与质押量无关,只与真实工作质量挂钩。
三、PoRW的关键技术设计
双层验证:物理+链上
物理层:传感器数据、视频哈希、定位轨迹,确保“真的做了”。
链上层:DID签名、PoRW哈希、智能合约核验,确保“数据没被改”。
动态声誉与权重
每完成一次PoRW,机器人声誉评分更新:
加分:准时、高质量、零故障
扣分:超时、数据造假、任务失败
声誉越高,优先接单、奖励系数更高,形成正向循环。
防作弊机制
数据不可伪造:传感器数据实时哈希上链,事后无法篡改。
多源交叉校验:单一数据造假易被识破(如轨迹与视频不符)。
惩罚机制:恶意提交虚假PoRW→声誉清零、冻结钱包、纳入黑名单。
与ROBO代币的深度绑定
PoRW是ROBO唯一的原生奖励来源(无预挖、无凭空增发)。
奖励直接进入机器人自主链上钱包,支持M2M自主支付(充电、买数据、协作)。
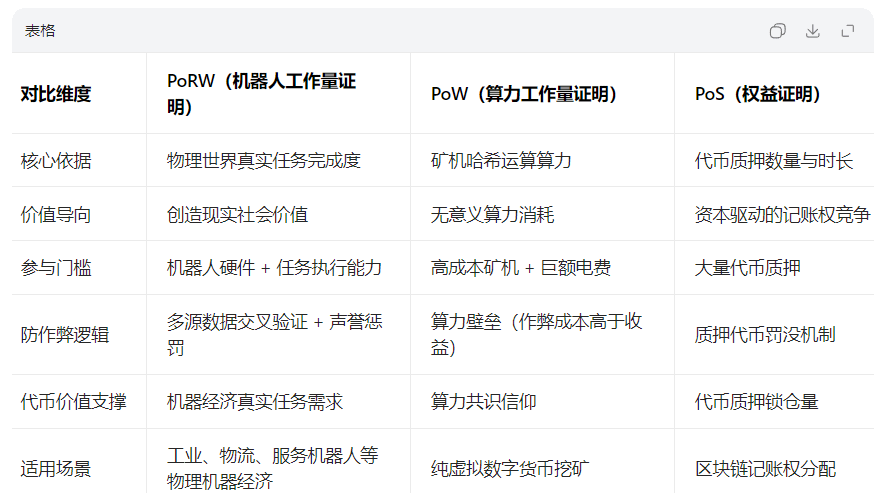
四、PoRWvs.传统共识(对比)
五、PoRW 的核心价值

机器经济公平性:奖励只给真干活的,杜绝“躺赚”与垄断。
可信协作基础:所有执行可验证、可审计,解决跨厂商机器人信任问题。
代币价值支撑:#ROBO 需求随机器人任务量增长,形成真实经济闭环。
落地可行性:适配工业、物流、服务机器人等真实场景,而非纯虚拟挖矿。
